
سیستم اسکنر لیزری همراه Street Mapper ، با چهار اسکنر لیزری دوبعدی بهطور همزمان، مختصات نقاط ابری سهبعدی را در چهار جهت جمعآوری میکند.

10 دیدگاه
دادههای رستری با فرمتهای گوناگونی ذخیره سازی میشوند. این مقاله با بیان قابلیتها و خصوصیات فرمتهای گوناگون دادههای رستری، کاربردهای هرکدام را به تفکیک مورد بررسی قرار میدهد.

5 دیدگاه
یک شبکه نامنظم مثلثی، نمایشی از سطحی پیوسته است که از اضلاع مثلثی تشکیل شده است. هر مثلث نمایانگر یک سطح در فضای سهبعدی است و رئوس این مثلثها نیز نقاطی مختصاتدار و سهبعدی هستند.

1 دیدگاه
در بسیاری از کاربردهای علمی و نقشهبرداری، هدف، تعیین موقعیت مکانی تعدادی از نقاط نسبت به یکدیگر است. روش تعیین موقعیت آنی یا RTK به همین جهت ابداع گردید.
6 دیدگاه
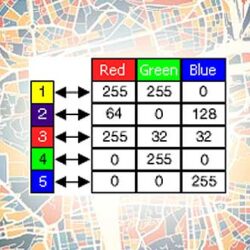
نگاشت رنگ یا ColorMap امکانی است که ما را قادر میسازد تا بتوانیم لایههای رستری که حاوی یک باند بوده و در اصل بصورت رنگی نیستند، را بهشکل رنگی و بصورت RGB نمایش دهیم.

0
ارزش هر پیکسل در یک رستر میتواند مثبت یا منفی، عدد صحیح یا اعشاری باشد. پیکسلها هم میتوانند ارزش NoData داشته باشند که نشاندهنده فضای فاقد اطلاعات یا NoData میباشد.

1 دیدگاه
نقش ایندکس مکانی، تسریع جستجوی داده موردنظر در انبوه دادههای مکانی است، بهعبارت سادهتر هنگامی از ایندکس مکانی استفاده میکنیم که میخواهیم عوارض مکانی ما سریعتر پیدا شوند.

3 دیدگاه
لیدار ( Lidar ) یک تکنولوژی برای اندازهگیری فاصله به روش هوایی است. در این روش انرژی نورانی به زمین ارسال شده، و از بررسی انرژی برگشتی به حسگر، فاصله به دست می آید.
0
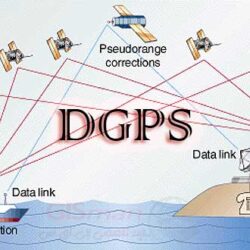
جی پی اس تفاضلی ، Differential GPS ( DGPS ) یا GPS تفاضلی یک نوع روش اندازهگیری دقیق است که کمتر تحت تاثیر شرایط جوی و خطاهای سیستمی (دستگاهی) قرار میگیرد.
1 دیدگاه
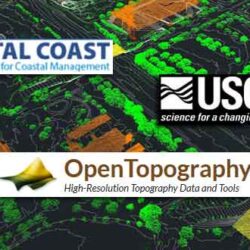
از آنجا که منابع اطلاعاتی لیدار(LIDAR)، نقش بسزایی در RS و GIS دارند، در این مطلب سعی بر این داریم تا شش منبع از برترین منابع رایگان اطلاعات لیدار را خدمتتان معرفی نماییم.

1 دیدگاه
ژئوفنس یا حصار جغرافیایی (Geofence) یک محدوده مجازی است که در نرمافزار مورداستفاده ما ایجاد میشود و محدودهای را که ما در آن هستیم مشخص کرده و همچنین مخابره میکند.

0
خطاهای فاصلهیابی در تعیین موقعیت براساس سامانه تعیین موقعیت جهانی GPS به عوامل بسیاری بستگی دارد، که میتوان آنها را در دو گروه خطاهای کاربر و خطای ابزارها تقسیم کرد.