آشنایی با جی پی اس تفاضلی (DGPS)
در مقالات گذشتهی ما، شما با مفاهیم اولیه GPS و همچنین خطاهای اندازهگیری و فاصله یابی GPS آشنا شدید و مسلماً شما جزء کسانی نخواهید بود که جی پی اس را با جی آی اس اشتباه میگیرند.
پس در این مقاله بر آن شدیم تا شما را با یکی دیگر از تکنیکهای اندازهگیری و تعیین موقعیت با جی پی اس آشنا کنیم:
Differential GPS ( DGPS ) ! جی پی اس تفاضلی یا بعبارت دیگر GPS تفاضلی
DGPS مخفف عبارت Differential GPS به معنای جی پی اس تفاضلی یا همان GPS تفاضلی است. به دلیل اینکه در محاسبات موقعیت به این روش از تفاضل معادلات تعیین موقعیت بهره برده میشود به این روش تفاضلی میگویند. دقت موقعیتيابی در جی پی اس تفاضلی معمولاً در حد 1 تا 2 متر و برخی مواقع کمتر است.
جی پی اس تفاضلی در واقع یک نوع روش اندازهگیری است و نباید به اشتباه یک دستگاه سختافزاری تصور شود. Differential GPS در مقایسه با GPS کمتر تحت تاثیر شرایط جوی و خطاهای سیستم (دستگاهی) قرار میگیرد.
درواقع، روش GPS تفاضلی تقریباً همه خطاهای سیستمی و جوی را که بر روی سیگنالهای GPS تاثیر میگذارند خنثی میشوند، اما در مورد خطاهای موضعی چندمسیری و گیرنده تغییر خاصی انجام نمیشود.
DGPS یا GPS تفاضلی چگونه کار میکند؟
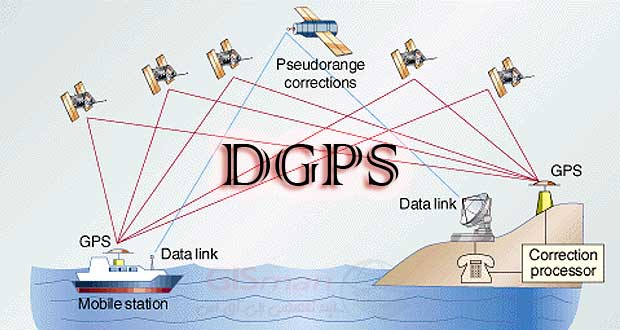
در DGPS از دو گیرنده استفاده میشود تا امکان بهرهمندی از مزایای روش GPS تفاضلی فراهم شود. استفاده از دو گیرنده است که واژه «تفاضلی» را معنی میبخشد. DGPS با مقایسه سیگنالهای دو GPS مختلف، کار تعیین موقعیت را دقیقتر انجام میدهد. شکل زیر، عملکرد Differential GPS را نشان میدهد.
دو روش برای اندازه گیری با دستگاههای جی پی اس تفاضلی یا Differential GPS مطرح میشود:
در روش اول، گیرنده DGPS كاربر که آن را rover مینامیم، سیگنالها را از ماهوارهها دریافت کرده و شبهفاصلهها را محاسبه میکند. به طور همزمان، این گیرنده سیگنالهای تصحیح را از یک منبع مرجع یا ایستگاه مبنا (Base) ، که روی نقطه ای با مختصات معین مستقر شده است، دریافت میکند. سپس گیرنده کاربر، این تصحیحات را روی شبهفواصل محاسبه شده، اعمال میکند تا موقعیت بسیار دقیقتری را به دست بیاورد. این روش در GPS تفاضلی اصطلاحاً « DGPS بلادرنگ » یا real-time DGPS نامیده میشود که روش غالب و رایج DGPS است.
روش دوم پسپردازش شده یا post-processed نام دارد. در این روش، بعد از کار میدانی، از یک رايانه ثالث و نرمافزار خاصی برای حل مساله موقعیتيابی استفاده میشود. دادههای خام (تصحیح نشده) از گیرنده كاربر و همچنين از منبع مرجع در رايانه وارد شده و پس از محاسبات، مختصات دقیق نقاطی که با گیرنده کاربر یا rover اندازه گیری شده بودند به دست میآید.
پس از بیان این مقدمه، به بررسی گیرنده ها و جزئیات روشهای ذکر شده میپردازیم:
گیرنده کاربر یا متحرک ( roving receiver )
گیرنده كاربر در خلال این مبحث، «گیرنده متحرک» یا «rover» نامیده میشود. همان طور كه كاربر در حال حرکت است، گیرنده متحرک موقعیت او را تعیین میکند (دقیقاً مانند همان کاری که یک گیرنده مستقل GPS انجام میدهد). اما با این تفاوت که اکنون گیرنده او، یک گیرنده GPS تفاضلی است.
اساسیترین تفاوتها میان یک گیرنده GPS اصلی و یک گیرنده متحرک شامل موارد ذیل میباشند:
- یک گیرنده رادیویی در گیرنده متحرک براي دریافت تصحیحات تفاضلی از ایستگاه مبنا.
- نرمافزاری برای اعمال این تصحیحات در شبهفواصل محاسبه شده گیرنده متحرک.
گیرنده مرجع ( reference receiver )
گیرنده مرجع (ایستگاه مبنا) یک گیرنده GPS است که در یک موقعیت مشخص (از نظر مختصات) قرار گرفته است. موقعیت مکانی این ایستگاه از طريق ساير روشهای نقشهبرداری (مانند روش زمینی) به طور دقیق محاسبه شده است.
ایستگاه مبنا موارد زیر را انجام میدهد:
- همه ماهوارههایی را که در دید خود دارد، ردیابی کرده و شبهفواصل را تا آنها اندازهگیری میکند.
- براي تعیین شبهفواصل، مساله GPS را در جهت عکس حل میکند (بايد به خاطر داشت که این ایستگاه، موقعیت دقیق خود را میداند). به عبارت ديگر، ايستگاه مبنا از موقعيت دقيق خود برای تعيين دقيق شبهفواصل استفاده مینمايد.
- فهرستی از تصحیحات را كه براي دقیق شدن شبهفواصل اندازهگیری شده مورد نيازند، برای همه ماهوارههای قابل رویت تولید میکند.
- اطلاعات مربوط به تصحیحات را به گیرندههای متحرک منتقل میکند (از طریق ارتباطات رادیویی).
یک ایستگاه مبنا این قابلیت را دارد که تعداد نامحدودی از گیرندههای متحرک را پشتیبانی کند. دقت کار با فاصله گرفتن گیرنده متحرک از ایستگاه مبنا کاهش مییابد و این کاهش عمدتاً به دلیل افزایش اختلاف در شرایط جوی (بین ایستگاه مبنا و ایستگاه گیرنده) است و باعث افزایش خطاهای فاصلهیابی کاربر میشود.
عوامل تاثیرگذار بر انتخاب محل ایستگاه مبنا عبارتند از: داشتن دید باز (بدون مانع و مزاحمت) به آسمان، دور نبودن از محدوده کاری، دور بودن از تداخل امواج رادیویی و وجود حداقل منابع ایجادکننده خطای چندمسیری.
روش اول: Differential GPS (DGPS ) بلادرنگ
دادههای تصحیح برای DGPS بلادرنگ معمولاً از طریق یک ارتباط رادیویی، از ایستگاه مبنا به گیرنده متحرک ارسال میشوند. ارتباط رادیویی سریعترین (و معمولاً راحتترین) روش برای انجام این کار است و مساله تاخیر را به حداقل میزان ممکن میرساند. منظور از این تاخیر، فاصله زمانی میان هنگامی است که اندازهگیریها انجام میشوند و زمانی که جواب مورد نظر توسط گیرنده متحرک (براي كاربر) توليد میشود.
هر قدر این زمان کوتاهتر باشد، بهتر است. همچنین میتوان از ارتباطات تلفن همراه (موبایل) نیز استفاده نمود اما عموماً این نوع ارتباط در سرعت و اتصال دارای محدودیتهای بیشتری نسبت به امواج رادیویی است.
روش دوم: Differential GPS (DGPS ) پسپردازش شده
به دليل اينكه تصحیحات DGPS بلادرنگ دارای تاخیر هستند، تصحیحاتی که بر روی اندازهگیریها اعمال میشوند، در واقع پیشبینی بر اساس تصحیحات ارسال شده چند ثانیه قبل هستند. DGPS پسپردازش شده، با بکارگیری مشاهدات چندمبنایی حاصل از قبل و بعد از اندازهگیری و همچنين استفاده از الگوریتمهای پیچیدهتر و دقیقتر میتواند به دقت بهتری دست يابد.
چرخه کامل عملیات پسپردازش در شکل زیر نشان داده شده است.
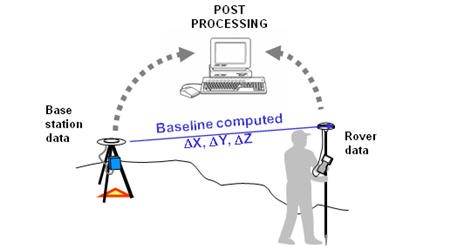

تکنیکهای پسپردازش، به دادههای خام ایستگاه مبنا که در قالب فایلهای رقومی ذخیره میشوند، نیاز دارند. این فایلها بعداً با استفاده از نرمافزارهای تخصصی و در مقایسه با فایلهای دادههای خام ایستگاههای متحرک پردازش میشوند. دادههای حاصل از ایستگاههای مبنا و متحرک میبایست شامل اندازهگیریهای همزمان شبهفاصله تا حداقل چهار ماهواره مشترک باشند. علاوه بر اينكه هر اندازهگیری بايد دارای برچسبهای زمانی دقیق باشد.
نرمافزار DGPS پسپردازش، خطا در هر اندازهگیری شبهفاصله GPS را -که توسط گیرنده ایستگاه مرجع ثبت شده است- محاسبه میکند و تصحیحات خطا را به اندازهگیریهاي موجود در فایل دادههاي گیرنده متحرک، اعمال میکند.
معرفی سامانه ملی هدی
در کشور ما نیز همواره سعی بر این بوده است تا از علوم نوین برای پیشبرد اهداف علوم مکانی بهره برده شود. در همین راستا، پس از استقرار طرح ژئودینامیک سراسری و همچنین شروعبهکار ایستگاههای دائمی GPS در سراسر کشور، امکان ارسال تصحیحات DGPS نیز ازطریق سامانههای مخابراتی فراهم گردید.

این سامانه با عنوان سامانه ملی هدی در سال 1389 و به همت کارشناسان خبره سازمان نقشهبرداری کشور آغاز به کار نمود. تعداد 18 ایستگاه در نقاط مختلف کشور در قالب این سامانه دادههای تصحیحات DGPS را مخابره کرده و به کاربران، اعم از ارگانهای دولتی و شرکتهای خصوصی، سرویس ارائه مینمایند.
با استفاده از این سامانه کاربران میتوانند با استفاده از یک دستگاه GPS و در اختیار داشتن تصحیحات نقاط توسعهیافته در سرتاسر کشور به دقت مناسب در تعیین مختصات نائل گردند. امیدواریم با توسعه این سامانه و فرهنگسازی مناسب بین کاربران دادههای مکانی شاهد سهولت کار و افزایش دقت تعیین مختصات نقاط باشیم.