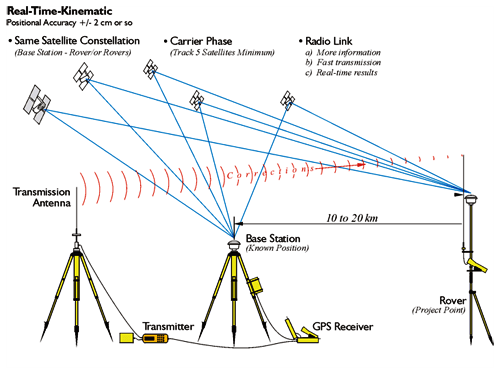
روش تعیین موقعیت آنی ، RTK ، در اواسط دهه 90 توسط سازندگان GPS ارائه گردید که با استفاده از آن میتوان به صورت آنی به دقتهای مورد نظر در نقشهبرداری دست یافت. در روش RTK کاربر برای تعیین موقعیت به طور معمول نیاز به یک ایستگاه مرجع در فاصله حداکثر 10 کیلومتری دارد تا بتواند به دقت سانتیمتری در تعیین موقعیت دست یابد.
وجه تشابه DGPS و RTK در این است که هر دو تکنیک، از دو گیرنده بهره میبرند. گیرنده مبنا، روی یک نقطه با مختصات معلوم تنظیم شده است. گیرنده متحرک نیز شما هستید.
دادهها در گیرنده مبنا جمعآوری میشوند. لیکن همانطور که در مطالب قبل ملاحظه نمودید، یکی از تفاوتها، میان GPS و DGPS در دقت آنهاست (DGPS دارای دقت بیشتری است). تفاوت دیگر این دو روش این است که در روش RTK، این دادهها به صورت آنی (real-time) به گیرنده متحرک فرستاده میشوند و در روش DGPS، این دادهها، ذخیره میشوند تا در مراحل بعدی پردازش شوند (post-processing).
RTK چیست و چگونه عمل میکند؟
همانطور که قبلاً اشاره شد، روش DGPS از شبه فواصل برای محاسبه موقعیت گیرنده بهره میگیرد. خطاهایی در این محاسبه دخیل هستند که ناشی از خطاهای اتمسفری هستند (مثلاً اثر یونوسفر، اثر تروپوسفر و …).
با داشتن موقعیت معلوم ایستگاه مبنا، این خطاها که بر روی شبه فواصل اثرگذار هستند، قابل برآورد میباشند.
اگر گیرنده متحرک در نزدیکی گیرنده مبنا باشد، فرض میکنیم که خطاهای شبه فاصله در گیرنده مبنا و متحرک، مشابه یکدیگر هستند. در این شرایط، گیرنده متحرک، همان خطاهای شبه فاصله در گیرنده مبنا را به شبه فاصله خود اعمال میکند و موقعیت دقیقتری را بدست میآورد.
میزان صحت این تکنیک در حد کمتر از یک متر میباشد (دقت مختصات مطلق را از حدود 5 تا 10 متر به چیزی در حد کمتر از یک متر میرساند). این روش در شرایط نزدیک بودن دو ایستگاه، هم برای روش تعیین موقعیت آنی و هم برای روش پس پردازش قابل انجام است. این تکنیک، برای بسیاری از گیرندههای دستی عمومی (غیر مهندسی) در دسترس است و معمولاً ارزان قیمت نیز میباشد.
خصوصیات سیستم تعیین موقعیت آنی(RTK)
RTK مخفف Real-Time Kinematic میباشد. عبارت «kinematic» از واژهای یونانی به معنی «حرکت کردن» مشتق شده است. بنابراين استفاده از تکنیکهای اندازهگیری RTK به این معنی است که میتوان در حال حرکت و فوری به دقتی بسیار خوب دست یافت که این امر قابلیتی چشمگیر و مفید است.
RTK برای همه افراد مناسب نیست. تجهیزات آن گرانتر و استفاده از آن تکنیکیتر و فنیتر از DGPS استاندارد است. اما برای نقشهبرداران و ساير کاربرانی که به بهترین دقت نیاز دارند، ابزاری حیاتی است.
RTK نه تنها از شبه فواصل برای محاسبه موقعیت استفاده می کند، بلکه از فاز حامل و اندازهگیریهای داپلر نیز بهره میگیرد که این امر منجر به ارزیابی خطای زمان (timing error) سیگنال میشود. ایستگاه مبنا، این دادهها را جمعآوری نموده و آنها را به گیرنده متحرک ارسال میکند.
گیرندههای RTK، این قابلیت را دارند که baseline (dx,dy,dz) را بین ایستگاه مبنا و متحرک محاسبه کنند. از آنجائیکه ایستگاه مبنا دارای مختصات معلوم میباشد و همچنین baseline با صحت کمتر از یک سانتی متر، قابل محاسبه است، لذا موقعیت ایستگاه متحرک میتواند با صحتی در حد میلیمتر محاسبه گردد.
رسیدن به این میزان از صحت، هزینه زیادی در برخواهد داشت. سیستمهای RTK معمولاً ده ها هزار دلار قیمت دارند. با وجود اینکه واژه RTK بر آنی بودن (real-time بودن) دلالت دارد، اما تکنیکهای کینماتیک پس پردازش نیز مدتهای قبل از RTK استفاده میشدند.
RTK کاملاً نسبی است
در بسیاری از کاربردهای علمی و نقشهبرداری، هدف، تعیین موقعیت یک نقطه بر حسب طول و عرض جغرافیایی نیست بلکه تعیین موقعیت مکانی تعدادی از نقاط نسبت به یکدیگر است.
موقعیتهای نسبی میتوانند در مقایسه با موقعیتهای مطلق و مستقل با دقت بسیار بالاتر اندازهگیری شوند و این برگ برنده RTK است. همانطور که گفته شد، RTK نيز مانند DGPS، از یک گیرنده متحرک و یک ایستگاه مرجع (مبنا) استفاده میکند. ایستگاه مبنا، تصحیحات بلادرنگ را به گیرنده متحرک میرساند.
موقعیتيابی فاز حامل
سیستم تعیین موقعیت آنی از طريق اندازهگیری فاز موج حامل (به جای کد PRN)، موقعیت مکانی نقاط را نسبت به ایستگاه مرجع تعیین میکند. سیگنال موج حامل دارای طول موجی کوتاهتر در مقایسه با پهنای چرخه کد PRN است (100 تا 1000 برابر کوتاهتر). بنابراین به همین نسبت، قابلیت اندازهگیری فاصله در تعیین موقعیت آنی ، RTK بهبود مییابد. در واقع، گویی فرآیند اندازهگیری با خطکشی که دارای درجهبندی ریزتری است، انجام میشود.
مزایا و معایب بهرهگیری از فاز حامل
بهرهگیری از فاز حامل دارای دو مزیت و یک عیب میباشد که به شرح زیر هستند:
-
مزیت: خطاهای گیرنده به کمترین حد میرسند.
با بكارگيري DGPS، به واسطه اندازهگیری کد PRN در یک نقطه مرجع و ارسال نتایج به گیرنده متحرک، خطاهای ماهواره و بعضی از خطاهای جوی به حداقل ميزان ممکن میرسند. اما با استفاده از فاز حامل (در RTK) و تکنیکهای پیچیدهتر ریاضی میتوان خطاهای گیرنده را نيز تا حد بیشتري حذف نمود.
-
مزیت: خطاهای جوی به کمترین حد میرسند.
تاخیر یونوسفری که برای سیگنال ایجاد میشود، تابعی قابل پیشبینی از فرکانس است. با اندازهگیری كردن تاخیرها در هر دو فرکانس حامل L1 و L2، میتوان خطای یونوسفری را با دقت بالا تعیین كرد و آن را به طور چشمگیری کاهش داد. به همین دلیل، گیرندههایی که دقت آنها تا حد سانتیمتر است، معمولاً هر دو حامل L1 و L2 را اندازه میگیرند و در فواصل بیشتری از ایستگاه مبنا قادر به كار كردن هستند.
-
عیب: ابهام فاز حامل باید با سعی و خطا حل شود.
فاز حامل برخلاف کد PRN، دارای شاخص زمانی نیست. این کد صرفاً امواج پشت سر هم هستند که همگی شبیه به يكديگر ميباشند. میتوان فاز یک دوره (چرخه) از یک حامل را با دقت بالا اندازهگیری کرد اما نمیتوان پی برد که چه تعداد دوره حامل میان گیرنده و ماهواره وجود دارد.
به هر حال در این مورد، فاصله تا ماهواره اهمیتی ندارد و فقط جهت و فاصله از گیرنده مرجع تا گیرنده متحرک حائز اهميت میباشد. این فاصله بسیار کوتاهتر است و امکان استفاده از حدس و گمان قوی ریاضی را فراهم میکند. كاربر ابتدا با امتحان کردن یک راه حل شروع كرده و سپس راه حل دیگری را آزمایش میکند تا دریابد کدام راه حل به بهترین نحو با همه اندازهگیریها هماهنگی دارد. این فرآیند، «آغاز RTK» یا گاهی اوقات «یافتن عدد صحیح» نامیده میشود.
هنگامی که تعیین موقعیت فاز حامل برای اولين بار در اواخر دهه 80 میلادی مورد استفاده قرار گرفت، موقعیتيابي صرفاً از طريق پسپردازش با رايانه -بعد از اینکه همه اندازهگیریها انجام شده و دادهها جمعآوری شدند- قابل انجام بود.
انجام محاسبات لازم برای به دست آوردن نتایج، مستلزم صرف ساعتها زمان بود. با پیشرفت تکنولوژی و فنآوری، اکنون انجام این محاسبات به صورت بلادرنگ در گیرنده متحرک امکانپذير است.
پسپردازش، به جای بلادرنگ، هنوز هم برای کاربردهایی که خواستار نهایت دقت (در حد میلیمتر) هستند، مورد استفاده قرار میگیرد. اما سیستم تعیین موقعیت آنی روشی است که از هر جهت منتخب نقشهبرداران و ساير کاربران GPS است.
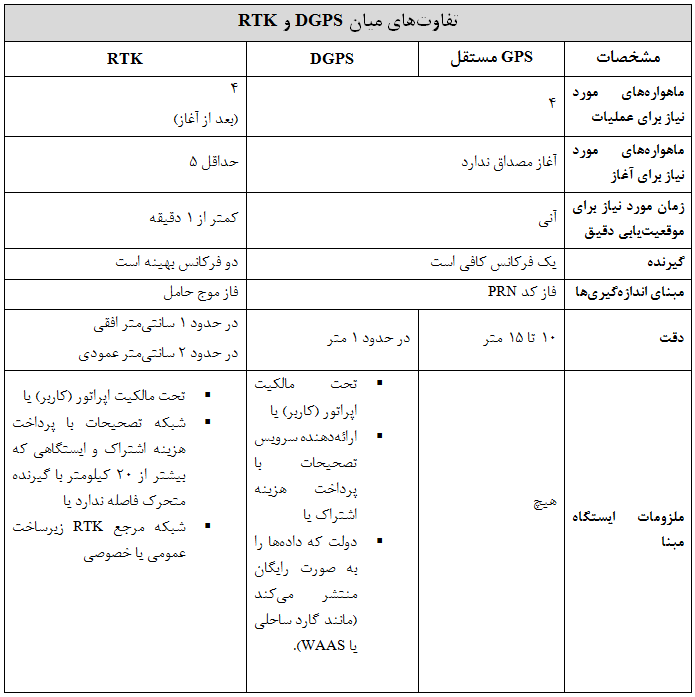
تفاوتهای میان DGPS و RTK
در جدول زیر به طور جزئیتر، تفاوتهای اساسی میان RTK با GPS مستقل و DGPS بررسی شدهاند:
منابع مرجع RTK
تاکنون فرض ما این بود که منبع اطلاعات تصحیح تعیین موقعیت آنی ، RTK، یک تک گیرنده مرجع میباشد. این فرض، محدودیت قابل توجهی را به همراه خواهد داشت و آن، فاصله است. هر قدر فاصله گیرنده متحرک از گیرنده مرجع در روش تعیین موقعیت آنی بیشتر باشد، مسیر سیگنالها از گیرندهها تا ماهوارهها -به دلیل عبور از قسمتهای مختلف جو- بیشتر دچار انحراف میشود. این تغییرات ايجاد شده در لايههای جوی (عمدتاً یونوسفری) كه به دليل فاصله بين گيرنده متحرك و گيرنده مرجع میباشند، افزایش خطا را در موقعیت محاسبه شده RTK سبب ميگردند. این خطای وابسته به فاصله، بيشتر برای پردازش فاز حامل، مشکل ايجاد میكند تا برای پردازش کد PRN.
اگر شرایط یونوسفر ملایم و مطبوع باشد، دستیابی به نتایج خوب در فاصله بیش از 20 کیلومتر از مرجع در روش RTK امکانپذیر است. در مناطق استوایی یا در شرایطی که یونوسفر فعال و پرتحرک است، نمیتوان بیش از 5 کیلومتر از مرجع فاصله گرفت، مگر اینکه خطر افت ناگهانی دقت پذيرفته شود.
مباحث مربوط به GPS و روشهای نوین مرتبط با آن، گسترده و پیوسته در حال نو شدن و پیشرفت میباشد. امید است با دنبال نمودن مطالب، اطلاعات شما در زمینههای مورد نظر بروز رسانی شده و پاسخ لازم به سوالات شما داده شود.