امروزه استفاده از اسکن لیزری زمینی (TLS) برای برداشت اطلاعات سهبعدی باکیفیت از مناطق شهری، بهطور قابلملاحظهای افزایش یافته است. این در حالی است که مدلهای شهری حاصل از تصاویر استریو و هواپیمایی LIDAR در دسترس هستند. از سوی دیگر روشهای مبتنی بر فتوگرامتری برد کوتاه میتوانند مدلهای سهبعدی مناسبی از سازههای شهری ارائه دهند. اما اسکنرهای لیزری زمینی، مانند Street Mapper، برای نقشهبرداری دقیق سهبعدی سایر سازههای ساختمانی مانند جزئیات جاده، مبلمان شهری یا پوشش گیاهی بسیار کارآمد و مناسب هستند. همچنین در فعالیتهای مربوط به بازسازی ساختمانهای سهبعدی، از طریق جمعآوری دادههای هوایی، ساختار تصویری ساختمانها فراهم میگردد. سپس از این سیستم برای بهبود کیفیت تصاویر استفاده میشود.
اسکنرهای لیزری با پلتفرم متحرک نیز امکان جمعآوری سریع و مقرونبهصرفه دادههای سهبعدی از بخشهای بزرگتر خیابان ، مثلاً پوشش نقطه کور نمای ساختمانهای همسایه، را فراهم میکنند. برای این منظور اسکنرهای لیزری زمینی به سیستمهای نقشهبرداری متصل شدهاند. نتایج بهدست آمده از این برداشتها در چند سال اخیر بهطورجدی مورد بررسی قرار گرفته و این سامانه هر روز در حال توسعه و بهبود میباشند.

دوربینهای ویدئویی و دیجیتالی متعددی توسط این سیستمها برای انجام عملیاتهایی نظیر تهیه نقشههای بزرگراه مورد استفاده قرار میگیرند. کاربرد آنها با استفاده از ادغام اسکنرهای لیزری بهطور قابلتوجهی افزایش یافته است. در این مقاله، عملکرد و دقت سیستم نقشهبرداری همراه Street Mapper، بهعنوان یک نمونه بهصورت خلاصه مورد بررسی قرار خواهد گرفت.
سامانه اسکنر لیزری همراه Street Mapper
سیستم اسکنر لیزری همراه Street Mapper، با استفاده از چهار اسکنر لیزری دوبعدی بهطور همزمان، نقاط ابری سهبعدی را در 360 درجه میدان دید کامل جمعآوری میکند. این سیستم بهراحتی به روی طیف وسیعی از انواع وسایل نقلیه قابل استفاده است. اولین سیستم Street Mapper از اوایل سال 2005 فعالیت خود را آغاز کرده است.
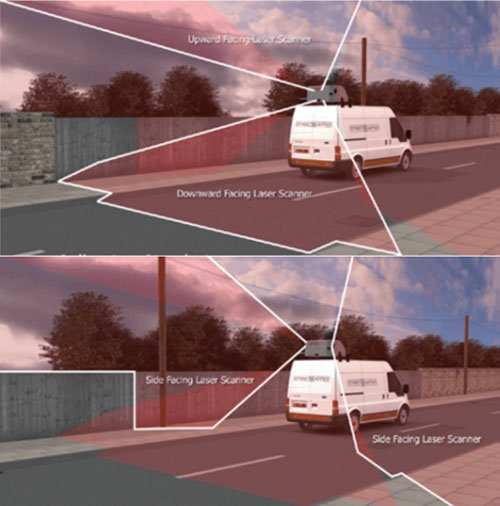
شکل فوق پیکربندی سیستم Street Mapper را با چهار اسکنر دوبعدی نمایش میدهد. در این نمونه، هر چهار اسکنر با حداکثر زاویه اسکن 80 درجه کار میکنند. موقعیت و جهتگیری پلتفرم سنسور از طریق ادغام مشاهداتGNSS (سیستمهای ماهوارهای ناوبری جهانی) و واحدهای اندازهگیری داخلی (IMU) به دست میآید. سیستمهای GNSS موقعیت دقیق متحرک را بهدست آورده و IMU نیز با سنسورهای شتابسنج و ژیروسکوپ خود موقعیت و زاویه دوربین را در لحظه تصویربرداری ثبت میکنند.
بررسی نمونه پروژه انجامشده توسط سامانه Street Mapper
در طی آزمایشی که در تاریخ 18 نوامبر 2007 صورت گرفت، فاصله 13 کیلومتری در حدود 35 دقیقه در مرکز شهر اشتوتگارت با ابعاد 1.5 کیلومترمربع پوشش داده شد.
بهمنظور بررسی موقعیتمکانی نقاطی که توسط سیستم Street Mapper برداشت شد نیاز به یکسری نقاط مرجع بود. در سال 2008، در یک تحقیق Barber و همکارانش از حدود 300 مختصات مرجع استفاده کردند. بدینترتیب که از طریق حرکت زمانسنج GPS ، موقعيت جغرافيايی نقاط گوشهای از نشانهگذاریهای سفيدرنگ جاده را اندازهگیری کردند. آنها در طول تحقیقات خود با استفاده از سیستم Street Mapper، مختصات این نقاط را از طریق دامنه پالسهای بازتاب شده، در اسکنر شناسایی کردند.
در این نمونه مطالعاتی از یک مدل شهری سهبعدی بسیار دقیق تهیهشده با روشهای مختلفی نظیر فتوگرامتری و نقشهبرداری زمینی، که توسط دفتر نظارت شهر اشتوتگارت نگهداری میشود، بهعنوان سطوح مرجع و برای سنجش دقت کار استفاده شده است.
بررسی دقت برداشت اطلاعات نقاط
درست مانند سامانههای لیدار هوابرد، دقت نقشهبرداری با استفاده از اسکنرهای لیزری دینامیکی زمینی، بهشدت به تعیین دقیق موقعیت و جهت اسکنر لیزری در هنگام برداشت اطلاعات وابسته است. البته شرایط مختلف موجود در یک وسیله نقلیه زمینی، نسبت به یک هواپیما، باعث اعمال الزامات مختلفی برای استفاده از سیستمهای GNSS / IMU میشود. تأثیرات چندگانه و سایههای ناشی از درختان و ساختمانها، نتایج حاصل از GNSS دریک وسیله نقلیه زمینی را با مشکل مواجه میکند. از این موارد میتوان بهعنوان محدودیتهای سامانههای اسکنرهای لیزری دینامیکی زمینی مانند Street Mapper نام برد.
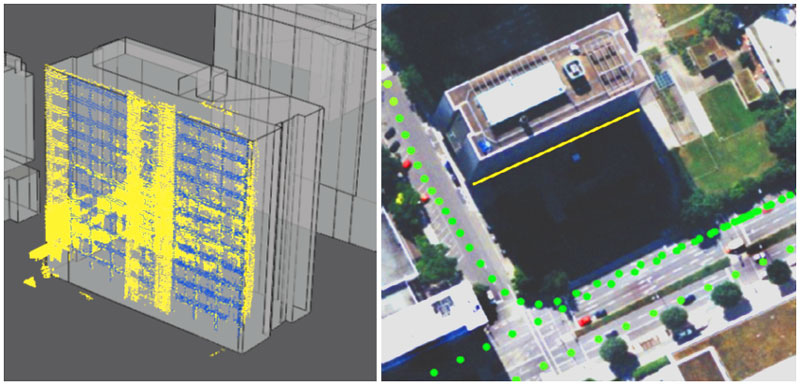
در شکل فوق، نقاط لیدار موجود برای ساختمان بارنگ زرد مشخص شدهاند، درحالیکه اندازهگیریهای مربوط به ساختمان انتخابشده با رنگ سبز نشان داده شده است.
علیرغم خطای ناشی از نقاط لیدار اندازهگیریشده، اختلاف بین سطوح برآورد شده کمتر از 9 سانتیمتر میباشد، درحالیکه انحراف استاندارد در حدود 4 سانتیمتر است.
همچنین در وضعیت غیرمطلوب GPS ای (در طی سایههای طولانیمدت GPS) تفاوتهای زیادی بین ساختمان مرجع و سطوح برآورد شده ایجاد میگردد. بااینحال، انحراف معیار سطحی برآورد شده قابلقبول بوده و نقاط ابری جمعآوریشده هنوز هم میتواند برای برنامههای کاربردی مانند اندازهگیریهای دقیق از راه دور و یا برداشت عوارض موردعلاقه مانند پنجرهها و یا قطعات دیگر استفاده شود، به شرطی که خطای خاصی برای موقعیت مطلق آنها قابلقبول باشد. علاوه بر این، اگر مدل ساختمانی موجود بهعنوان نقاط کنترل مورداستفاده قرار گیرد ،دقت مطلق فرآیند زمینمرجع سازی را میتوان بهبود بخشید.
سخن پایانی
درنهایت میتوان چنین نتیجه گرفت که سیستم Street Mapper بهعنوان یک نمونه از سیستمهای Mobile Mapping با رعایت شرایط استاندارد و مطلوب میتواند پوششی خوب و دقیق از نقاط سهبعدی در مناطق شهری فراهم کند که برای بسیاری از برنامههای نقشهبرداری کاربرد دارد. بهعنوانمثال، دادههای حاصل از آن بهخوبی میتواند برای استخراج عوارضی مانند پنجرهها و یا درهای ساختمانهای برداشتشده مورداستفاده قرار گیرد.