امروزه روشهای مختلفی برای تعیین مختصات و اندازهگیری آن معرفی شده است، اما هیچکدام از آنها بدون خطا نمیباشند. شناسایی خطاهای اندازهگیری به ما کمک میکند تا آنها را به حداقل ممکن رسانده و دقتهای بالایی را تجربه کنیم. همانطور که در مقالات قبلی ما در خصوص سامانه تعیین مختصات جهانی (GPS) اطلاعاتی را کسب کردید، اساس کار GPS تعیین فاصله گیرنده از ماهواره است. پارامترهای مختلفی بر اندازهگیری فاصله تأثیر میگذارند و از آنها به خطاهای فاصلهیابی تعبیر میکنیم.
در این مقاله قصد داریم شما را با انواع خطاهای فاصلهیابی آشنا کرده و جنبههای مختلفی از تعیین مختصات را بررسی کنیم که شاید تابهحال از نگاه ما دورافتاده باشند. خواندن این مقاله را به تمام کارشناسان دادههای مکانی توصیه میکنیم. در این مقاله عباراتی را استفاده خواهیم کرد که نیاز به توضیح بیشتر دارند و انشاءالله در مقالات بعدی بهتفصیل راجع به آنها صحبت خواهیم کرد.
خطاهای فاصلهیابی در سیستم تعیین موقعیت جهانی(GPS)
سامانههای تعیین مختصات، چنین سیستم پیچیدهای با حیطه عملکرد جهانی که تحت تأثیر عوامل بسیار زیادی کار میکند، مسلماً با خطاهای بسیاری روبرو خواهد بود. بعضی از این خطاها را میتوان با دقت نسبتاً بالایی پیشبینی و مدل كرد اما برخي دیگر را نمیتوان.
خطاهای فاصلهیابی به دو گروه زیر دستهبندی میشوند:
1- خطاهای فاصلهیابی کاربر(User Range Errors)
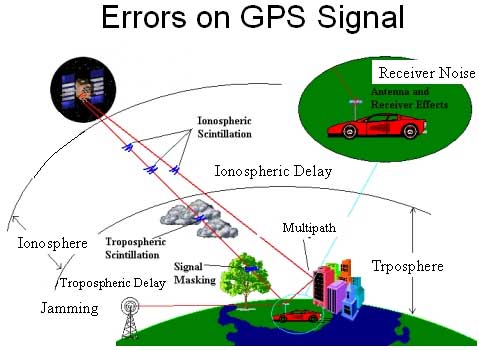
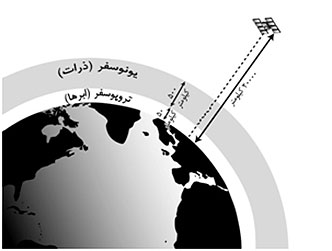
این خطاها عمدتاً ناشی از بخشهاي کنترل فضايی و زمینی میباشند. خطاهایی مانند افمریس، خطاهای ساعت ماهواره و خطاهای اتمسفری که به دلیل تأخیر سیگنالها در یونوسفر(ionosphere) و تروپوسفر(troposphere) ایجاد میشوند، از اين دستهاند (شکل زیر).
2- خطاهای وسایل و ابزارهای کاربر(User Equipment Errors)
این خطاها عمدتاً ناشی از دستگاههای کاربر و شرایط محلی میباشند و عبارتاند از: خطای توجیه آنتن(antenna orientation)، نویز گیرنده و نیز مشکلاتی از قبیل خطای دریافت چندمسیری(multi-path reception error) و اختلال (پارازیت) الکترومغناطیس.
1- خطاهای فاصلهیابی کاربر
ترکیبی از خطاهای سیستم و خطاهای اتمسفری، خطاهای فاصلهیابی کاربر(URE) را تشکیل میدهند. این خطاها میتوانند بهواسطه استفاده از DGPS یا تکنیکهای چندفرکانسی(multiple-frequencytechniques)، بهطور قابلتوجهی کاهش پیدا کنند.
1- 1- خطاهای افمریس
سیستم GPS دائماً انحراف ماهوارهها از مسیر را مورد بازبینی قرار میدهد و تصحیحات افمریس را محاسبه کرده و منتشر میکند. بااینوجود، ندرتاً به دلیل متوقف شدن توليد تصحیحات و درنتیجه بهروز نبودن اطلاعات در بعضی از موارد، وجود خطاهایی در تعیین محل دقیق ماهواره اجتنابناپذیر است.
1-2- خطاهای ساعت ماهواره
اگرچه ساعتهای اتمی درون ماهوارهها خيلي دقیقاند، اما كاملاً بيعيب نيستند و به آهستگی دچار شیفت زمانی(drift) میشوند. این شیفت تدریجی، خطایی را در فاصلهیابی ایجاد مینماید.
1-3- تأخیر یونوسفری
یونوسفر، لایه فوقانی اتمسفر است که از ارتفاع 50 کیلومتر از سطح دریا شروع میشود و تا ارتفاع 500 کیلومتر ادامه دارد. این لایه، عمدتاً از ذرات یونیزه (باردار) تشکیل شده است که میتوانند باعث تأخیر و کندی سیگنالهای GPS شوند. این تأخیر بسته به محل و زمان تغییر میکند و اثر آن در مناطق استوایی و قطبی قابلملاحظهتر است.
1-4- تأخیر تروپوسفریک
تروپوسفر، لایه پایینی اتمسفر زمین است که تغييرات فصول در آن رخ ميدهند. تروپوسفر مملو از بخار آب بوده و دما و فشار در آن متغیر است كه در عمل باعث ایجاد خطای کوچکی در ارسال سیگنالهای GPS میشود.
و اما راه حل : مدلسازی خطای اتمسفریک
مدلهای ریاضی اتمسفر (پیشبینیها) در گیرندههای GPS درجشدهاند و ذرات باردار موجود در یونوسفر و همچنين محتویات گازی متغیر تروپوسفر نيز در این مدلها لحاظ شدهاند. ماهوارهها اطلاعات بهروز شده برای مدل یونوسفری را بهطور پیوسته ارسال میکنند. نتیجه این است که عمده خطای تروپوسفریک و قسمتی از خطای یونوسفری، از طریق مدلسازی ریاضی در گیرنده كاربر حذف میشوند.
روشهای دیگر برای مدیریت خطاهای اتمسفریک
تکنیکهای دیگری نيز وجود دارند كه میتوانند قسمت عمده خطای اتمسفریک را حذف کنند. این تکنیکها عبارتاند از:
- GPS تفاضلی
گیرندههای DGPSی که تصحیحات را از گیرنده ثانویهای، که دارای موقعیت مکانی معلوم است، دریافت میکنند، قادر به خنثی کردن دقیق تأخیر اتمسفریک هستند.
- اندازهگیری فاز موج حامل در دو فرکانس
سیگنالهای با فرکانس کمتر هنگام عبور از یونوسفر، نسبت به سیگنالهای با فرکانس بیشتر به میزان بیشتری کند ميشوند و سرعت خود را از دست میدهند. برخی از گیرندههای غیرنظامی پيشرفته قادر به مقایسه هر دو موج حامل L1 و L2 میباشند تا به تصحیح دقیقتری برای تأخیر یونوسفری برسند.
2- خطاهای وسایل و ابزارهای کاربر
منبع این نوع خطا برگرفته از گیرنده و آنتن، اختلال (پارازیت) حاصل از سیگنالهای دیگر و دریافت چندمسیری میباشد.
2-1- خطاهای گیرنده
گیرندههای GPS میتوانند به دليل نقص در اندازهگیری همه سیگنالها بهطور یکسان و مساوی، دارای خطاهای کوچکی باشند. مثلاً آنتن ممکن است دارای تأخیرهای مختلفی برای سیگنالها در ارتفاعهای مختلف باشد.
2-2- خطاهای چندمسیری
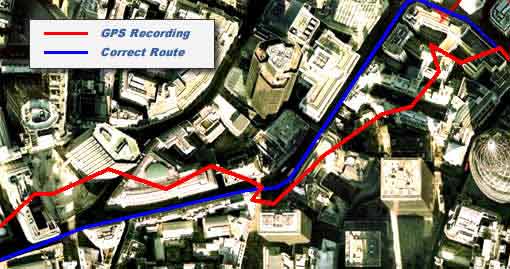
در همه محاسبات خطاهای فاصلهیابی GPS، فرض را بر مبنای کوتاهترین فاصله ممکن (فاصله مستقیم) میان ماهواره و گیرنده میگذارند. خطاهای چندمسیری هنگامی رخ میدهند که سیگنالي قبل از رسیدن به گیرنده، به عوارض نزدیک آن، مانند ساختمانها، برخورد ميكند و سپس به گیرنده میرسد (شکل زیر). نتیجه میتواند چندین سیگنال باشد که به گیرنده میرسند : اولین سیگنال، سیگنال مستقیم (منعکس نشده) است و یک یا چند سیگنال بعدی که با تأخیر به گیرنده میرسند، سیگنالهای منعکسشده هستند كه اگر بهاندازه کافی قوی باشند، میتوانند گیرنده را بهاشتباه انداخته و باعث خطاهای اندازهگیری فاصله شوند.

به دلیل اینکه وضعیت چندمسیری شدن، با حرکت ماهواره تغییر میکند، بنابراين اثر این خطا اغلب در طی يك بازه زمانی کوتاه متغیر است (مخصوصاً اگر گیرنده در یک مکان ثابت قرار داشته باشد). برعکس، مواقعی که گیرنده در حال حرکت است (مثلاً در خودرو یا هواپیما)، اثرات منفی چندمسیری شدن کمتر است.
2-3- EMI/RFI
به دلیل اینکه GPS از سیگنالهای با قدرت بسیار کم بهره میگیرد كه گیرنده باید آنها را از نویزهای محیط تمیز دهد، به همین دلیل، سیستم بهواسطه اختلالات (پارازیتهای) الکترومغناطیسی یا رادیویی (EMI/RFI) نمیتواند کار خود را بهخوبی انجام دهد.
- دچار اختلال شدن سیگنالهای GPS
سیگنالهای GPS میتوانند توسط سیگنالهای رادیویی یا امواج الکترومغناطیس دچار اختلال شده و از بین بروند. این اختلال معمولاً بهعنوان یک اثر جانبی سیگنالهای قانونی و مجاز (مانند RFI عمومی) و یا فعالیت بسیار شدید لکه خورشیدی حادث میشود.
- اسپوفینگ
اسپوفینگ به معنی انتشار سیگنالهای شبیه به GPS، با هدف به اشتباه انداختن گیرندههای معمول است، بهطوریکه زمان و مکان را غلط محاسبه كنند. سیگنالهای نظامی در راستاي عملیات آنتیاسپوفینگ رمزگذاری میشوند.
2-4- قابلیت انتخاب تصادفی
در ابتدای عمر GPS، دولت آمریکا از قابلیت انتخاب تصادفی برای کاهش دقت سیستم کاربران غیرنظامی استفاده میکرد. دلیل این امر این بود که از سوءاستفاده نیروهای دشمن از این سیستم در جهت مقاصدشان جلوگیری به عمل آید. S/A خطاهای متغیری را بهطور پیوسته در تعیین موقعیت ايجاد میکرد که گاهي به 100 متر هم میرسيدند. S/A در سال 2000 به دستور ریاست جمهوری وقت آمریکا متوقف گردید.